
无人船虚实融合算法训练平台
构建虚实融合无人船测试环境,实现自动驾驶算法训练、验证与评估。
海洋无人船自动驾驶虚实融合算法训练仿真测试智能航行科研创新

无人船虚实融合算法训练平台
构建虚实融合无人船测试环境,实现自动驾驶算法训练、验证与评估。
1. 项目概述
项目背景
随着无人船自主航行技术的发展,自动驾驶算法在研发过程中需要大量测试与验证工作。传统实船测试受场地、环境和组织条件限制,测试成本较高且难以复现复杂场景。为支撑无人船自主航行算法的研究、开发、验证与优化,项目建设了一套基于虚实融合技术的无人船仿真驾驶测试平台,通过构建与实景水域对应的三维虚拟航行环境,并结合真实无人船控制器,实现虚拟环境与实体船舶协同运行的测试体系。
项目内容
项目围绕无人船自动驾驶算法测试需求,建设三维航行环境、背景交通流仿真、测试任务管理、算法在环运行、控制器对接及结果评价等功能模块。平台支持岸线、航道、桥梁、泊位、码头、航标等航行环境构建,支持背景交通流智能体模拟、多场景测试任务组织、自动驾驶算法隔离运行以及虚实融合在环测试。系统实现测试任务全过程记录、结果管理与评价分析,为无人船自动驾驶算法训练与验证提供统一支撑平台。
2. 解决的问题
自动驾驶算法验证成本较高
无人船自动驾驶算法研发过程中需要频繁开展测试验证工作,传统实船测试组织复杂,测试成本较高,难以支撑算法快速迭代。
复杂航行场景难以重复构建
多船会遇、复杂航道及特殊交通流场景难以在真实环境中持续复现,影响算法训练与验证效率。
缺乏统一的测试任务管理环境
测试场景、航行规则和交通流数据分散管理,不利于测试任务复现、对比分析和结果归档。
自动驾驶算法与实船联调困难
算法研发与实体船舶控制系统之间缺乏统一的验证平台,难以形成完整的测试闭环。
测试结果缺乏统一评价依据
测试过程数据、运行结果和评价指标缺少统一管理,难以支撑算法性能评估与持续优化。
3. 成果展示
测试场景编辑
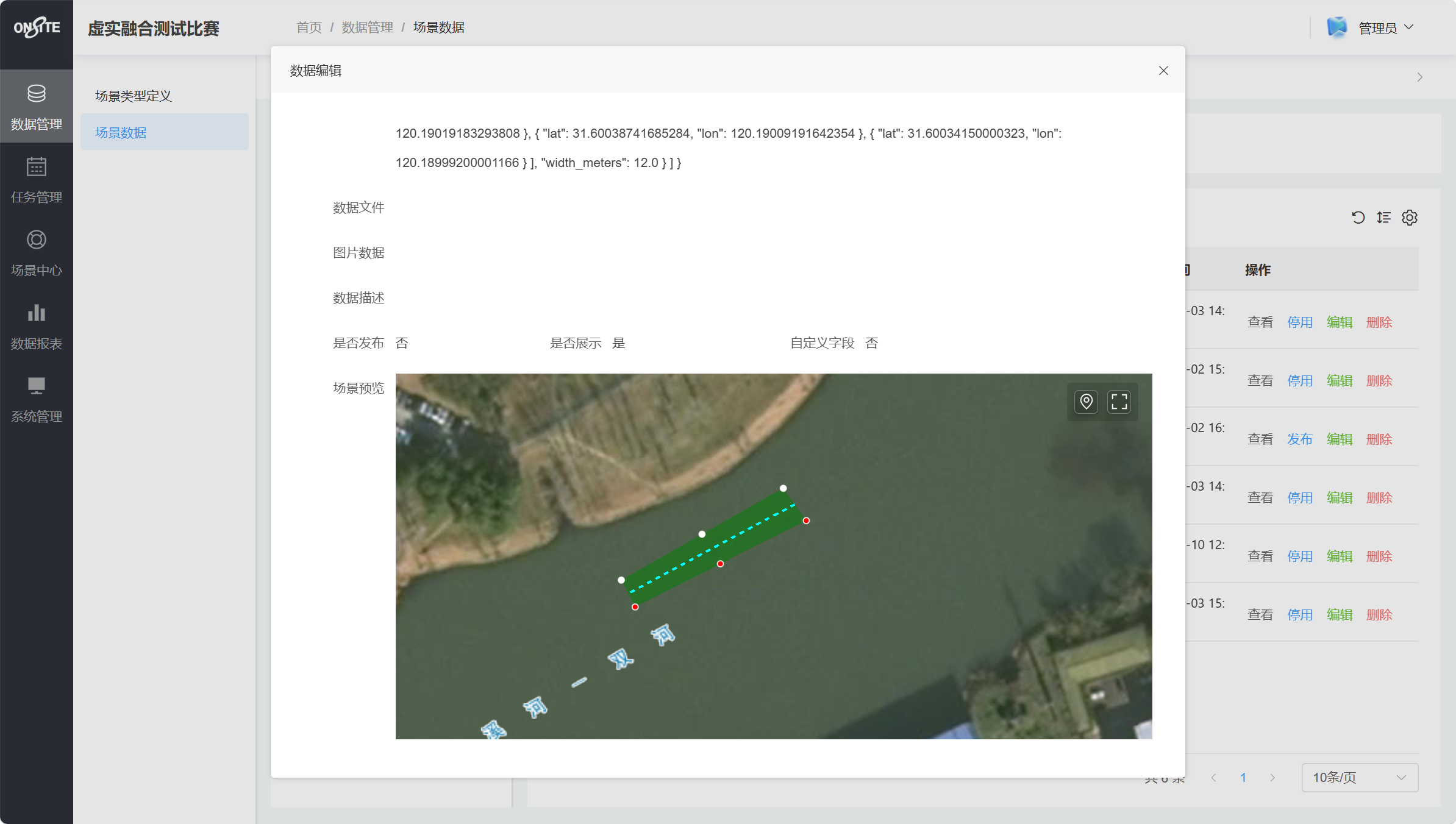
支持航道、岸线及测试区域配置管理,可对测试环境和任务参数进行编辑,为不同测试场景的构建与复现提供基础支撑。
测试任务预览
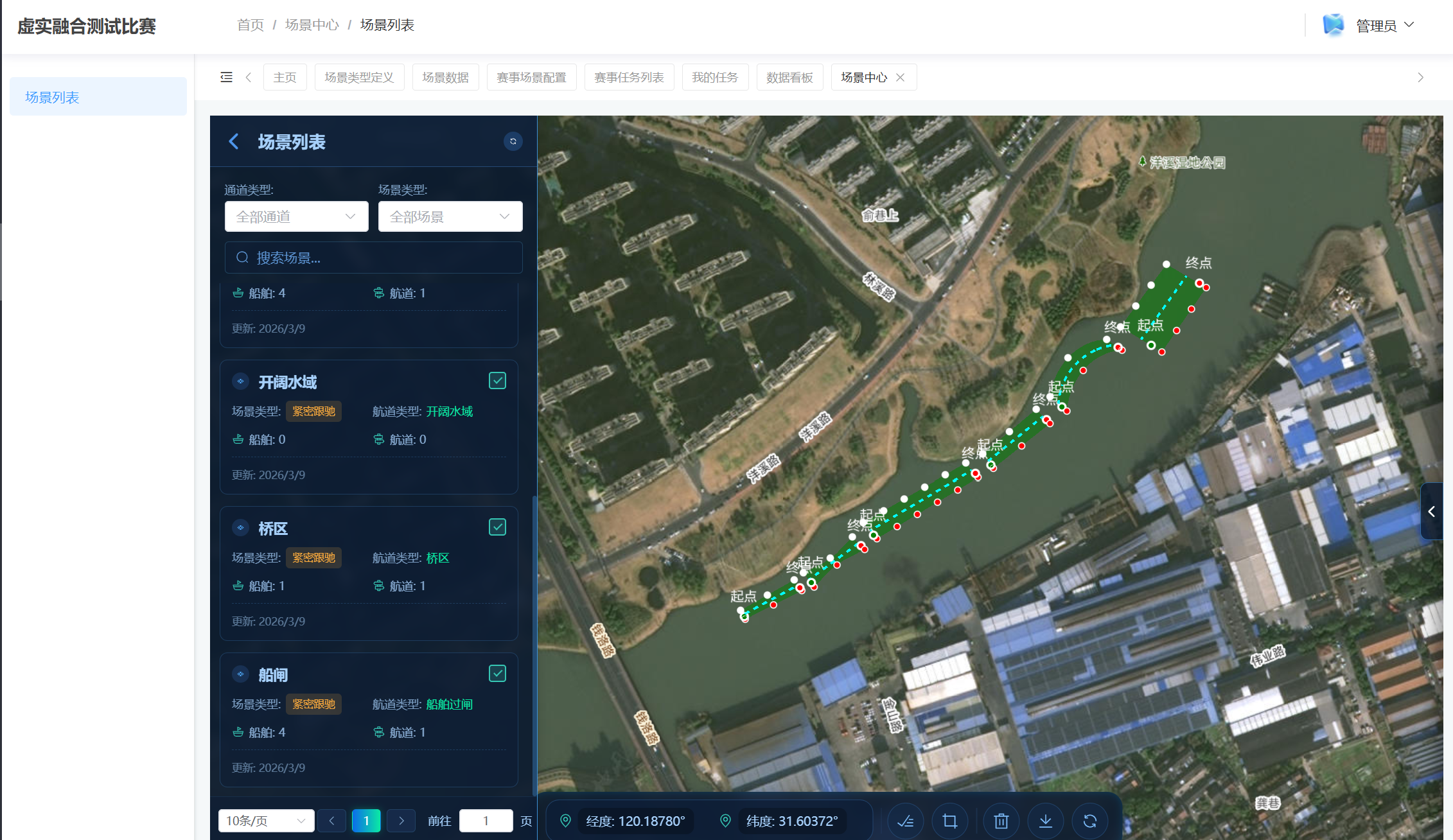
支持测试任务创建与预览,可关联航道环境、背景交通流及任务参数,实现测试任务的统一组织与管理。
实船运行监测

支持实体船舶运行状态监测,可实时查看船舶位置、姿态及运行信息,实现测试过程的动态监控。
虚拟环境与实船融合

实现虚拟航行环境与实体无人船协同运行,通过虚实融合方式开展自动驾驶算法在环测试与验证。
算法运行结果评估
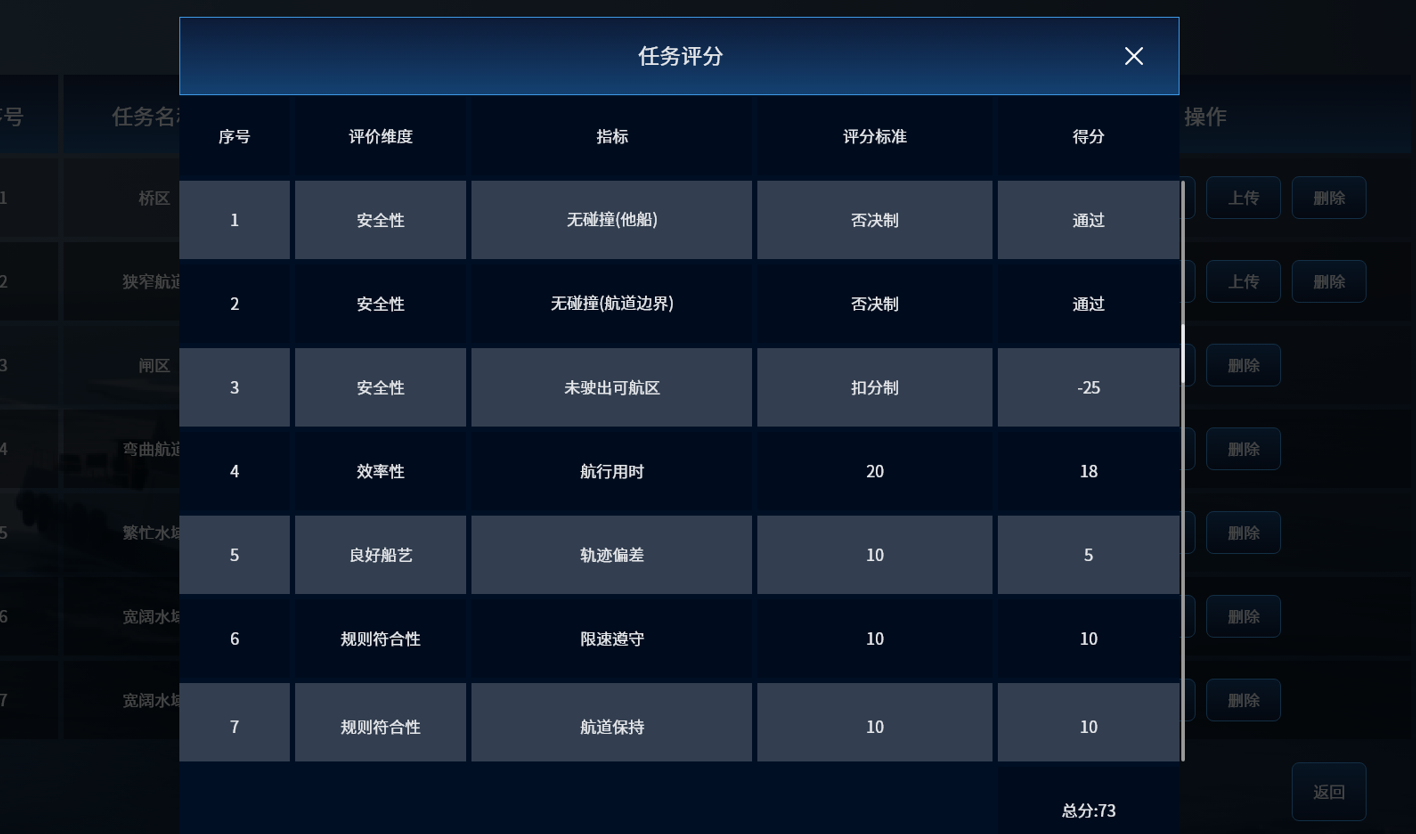
支持测试结果统计与评价分析,对不同测试任务下的算法表现进行量化评估,为算法优化提供依据。
测试任务管理与结果查看

支持测试任务全过程记录、结果查询与归档管理,实现测试数据的统一管理与可追溯。

